micro:bitでミニETCゲート
目次
0.アイディア
家にあったミニカー、子供用のブロックであるJOIZ(ABOUT JOIZ | おもちゃ-ピタゴラス・ブロック | 乳幼児玩具メーカー・ピープル)、サーボモーターを使い、次のようなミニETCゲートを作ってみました。ミニETCは、自動モードの他、手動モードでも開閉できます。手動モードには遠隔操作もあります。
- 自動モード
- 磁力センサーでミニカーに積まれた磁石を探知(↓動画)
- 手動モード
- A/Bボタン
- Bluetooth
- モバイルアプリ
#microbit tiny ETC gate demo pic.twitter.com/49PjsmQgin
— vivitelaeti (@vivitelaeti) 2022年3月1日
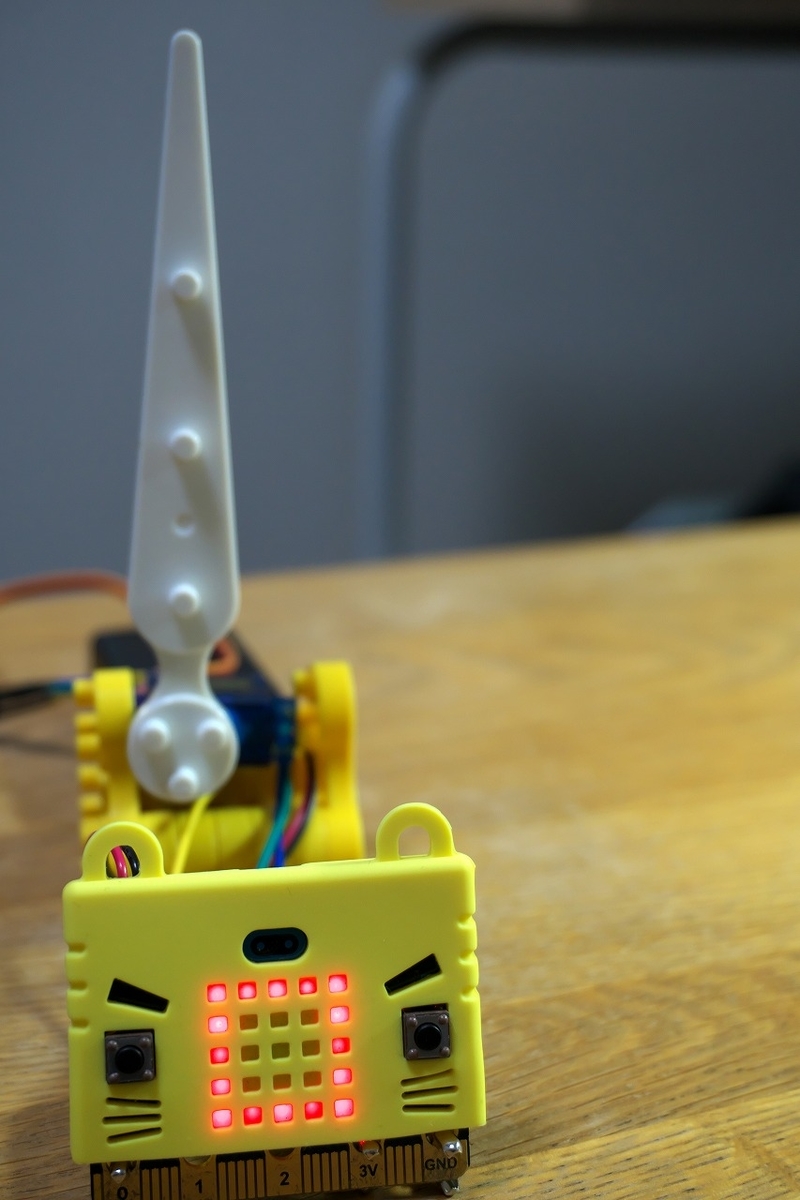
クローズ
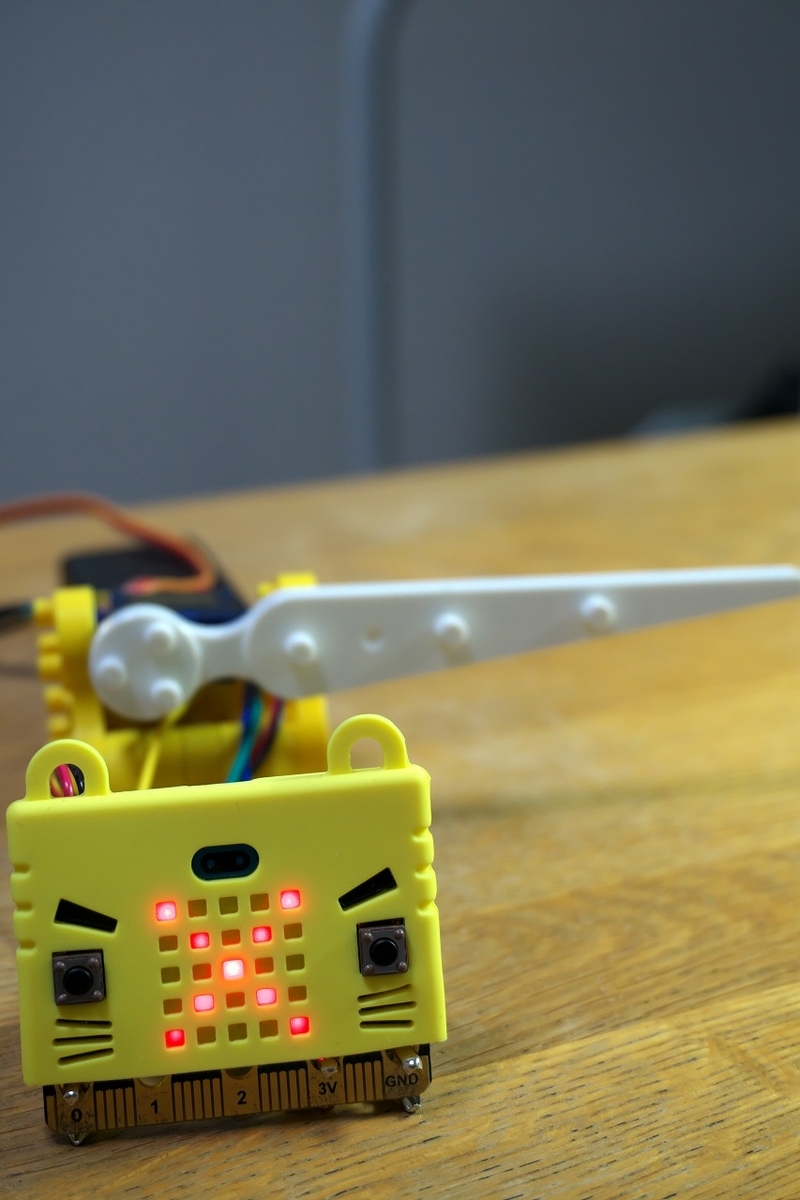
オープン
1.必要なもの
- micro:bit 本体
- 電源(今回は単3x2の電池ボックス)
- サーボモーター(今回はSG-90)
- ケーブル(今回はワニ口〜ジャンパーピン(オス))
- JOIZ(JOIZ Basicの方ですが、JOIZ Firstでも部品は足ります)
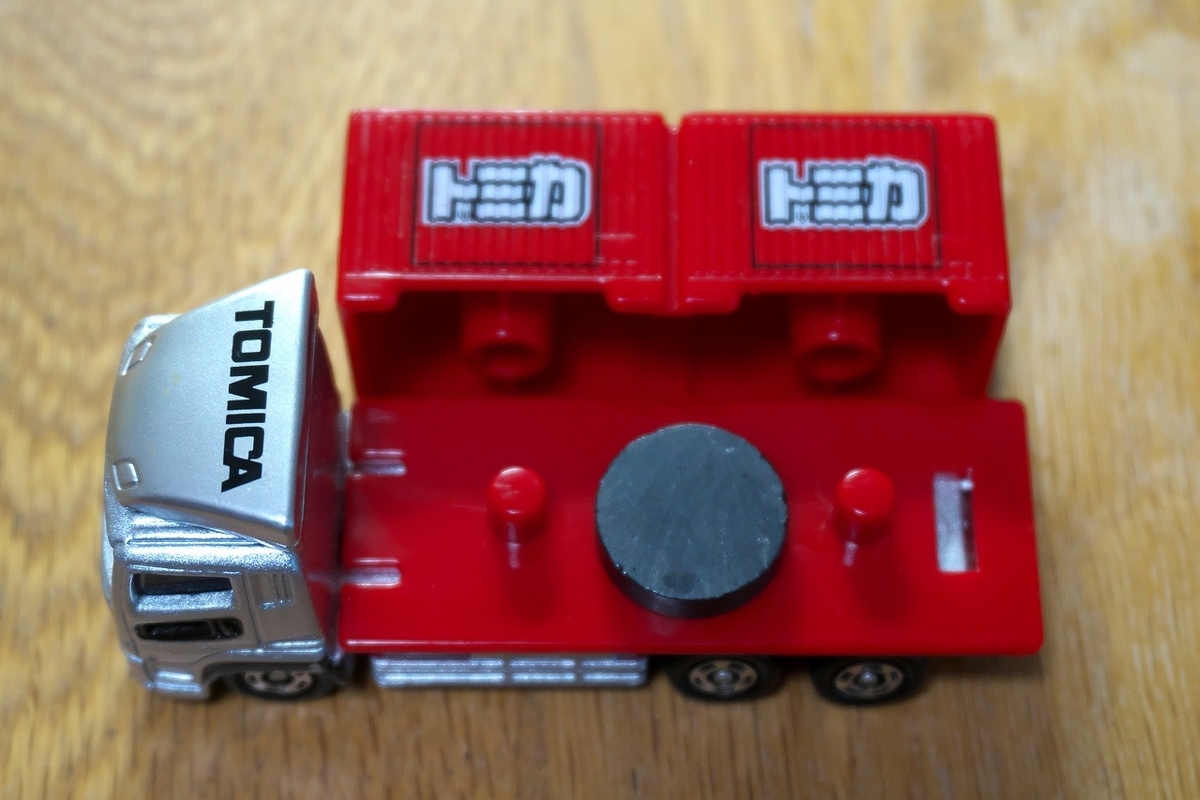
- トミカ(今回は2018年発売のトミカ No.85 三菱ふそう スーパーグレート)
- 磁石
2.組み立て方
全体の繋ぎ方
電源→micro:bit→モーター→ETCゲートのバーと繋いでいます。ただし、置く順番としてはLEDの表示が見えやすいように、micro:bitを手前(写真右手=ミニカー侵入口側)に持ってきています。
サーボモーターとETCゲートのバー
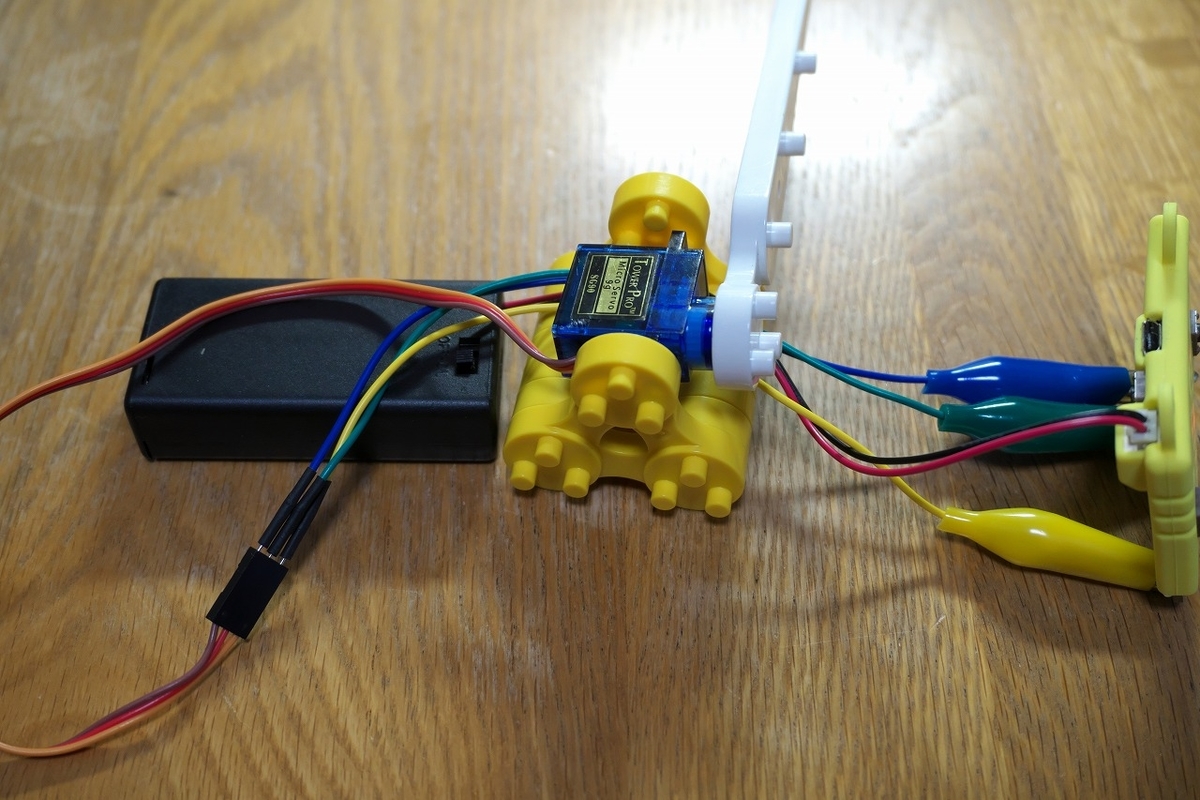
サーボモーターには、付属のサーボホーンの代わりに、JOIZの細長いブロック1つを繋いでいます(繋ぐ角度は、makecodeで0度に設定したときにクローズ状態すなわち地面と水平になるように調節しています)。
JOIZの穴の大きさが偶々合うのですが、サーボホーンのように穴に細かいギザギザがないため1、繋いだ状態でブロックに少し負荷をかけると外れます。変に負荷に耐えたりしないので、今の所破損などはないようですが、メーカーでこのような繋ぎ方が想定されているわけでは全くないため、不具合が出ない保証はありません。
micro:bitとサーボモーター
micro:bitとサーボモーターは、makecodeのシミュレーターで出てくる方法で繋いでいますが、サーボモーターのデータシートで要求される電圧未満となります。これでも新品の電池などでは動きますが、電池の容量が低下すると、安定しないことがあります。本来は、モジュールを使うなどしてサーボモーターに十分な電圧を供給する方が安定します。

サーボモーターの土台
サーボモーターの土台は、JOIZのブロックのうち、丸が3個繋がったものを2つ両側に置き、その間を、丸が2個繋がったもの5つで繋いでいます。これも偶々サーボモーターの突起部分が片方の丸3個ブロックの凹の隙間に入り込み(写真左手)、もう片方が丸3個ブロックの凸にあたり(写真右手)、これでおおよそ固定されるようです。

ミニカー
ミニカーには小さい磁石を積んでいますが、小さいお子さんなど誤飲に注意が必要です。
3.プログラム
オープンとクローズ
ETCゲートをオープン・クローズする部分です。モードや遠隔操作方法によって、幾つかのブロックからオープン・クローズするため、関数にしています。
関数の中でサーボモーターを動かす方法としては、「入出力端子」>「サーボ 出力する 端子○ 角度○」ブロックを使って、オープンの角度は90度、クローズの角度は0度としています。単に角度のところにその数値を入力するだけでは、一瞬でゲートがその角度まで動いてしまうため、「ループ」>「変数○を0〜○にかけて繰り返す」を使って、1度ずつ動くようにしています。
また、ゲートが開いているのにオープン、閉じているのにクローズ、という意味のない呼び出しがなされた場合には、不要な動作をしないように、「ゲート」変数でフラグを立てています。

モード切替え
ETCを模すというところからは離れますが、磁力で開閉する自動モードの他に、遠隔操作して動かす手動モードも選択できるようにしています。
切替えそのときの状態が自動と手動のいずれか、区別できるようにしておくため、「オート」変数(0: 手動、1: 自動)でフラグを立てています。 本体のボタン(A+B)で、自動モードと手動モードの切替えを可能にしています。

自動モード
自動モードでは、磁石を積んだミニカーがETCゲートに近づいたときだけ開くようにする(普通のミニカーでは開かないようにする)ため、磁力センサーで磁石の接近による磁力の変化を探知しています。「入力」>「その他」>「磁力(μT)」のブロックを使い、X方向(左右方向)の磁力の絶対値を導いてそれが閾値を上回れば、オープン関数を呼びだしています。

手動モード(ボタン)
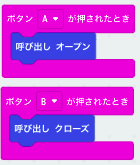
本体のA・Bボタンにそれぞれオープン・クローズ関数を割り当てています。
手動モード(標準の無線機能)
本体のボタンだけではなく、遠隔操作もやってみたくなります。
micro:bitを遠隔操作する方法は幾つかあり、標準の無線機能(Radio/radio - micro:bit runtime)を用いて、他のmicro:bitから操作することが一番簡単です。
手動モード(Bluetooth)
今回は、Bluetoothにより、スマホと接続してスマホアプリからの操作を試してみました。micro:bit v2のプロトコルは、Bluetooth 5.1 with Bluetooth Low Energy(BLE)となります(Hardware)。
micro:bitで、Bluetooth接続を使うためには、次の①②の事前準備を行います。
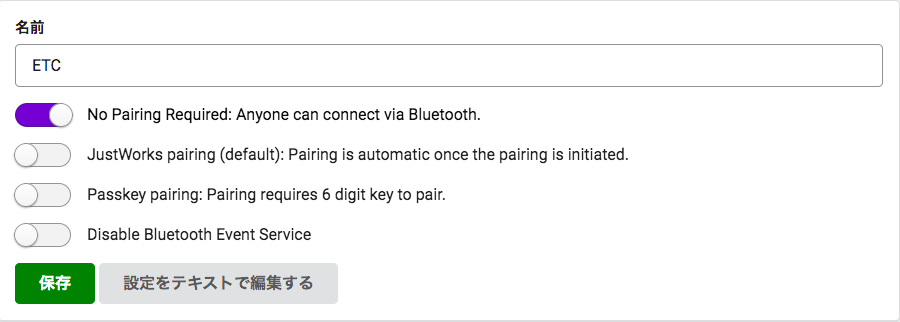
①No Paring Required
MakeCode Editorの右上の歯車>「プロジェクトの設定」をクリックすると表示される1番上のトグルボタン(No Paring Required)をオンにすることで、ペアリングを不要にすることができます。
この設定をスキップしても、実際に使用する際、スマホとのペアリングを行えばBluetoothを使うことはできます。(A+Bを押し続けたまま、リセットボタンをオンオフして待つ。Pairing via Bluetooth : Help & Support)。
右上の歯車又は左側のメニューから「拡張機能」をクリックし、"Bluetooth"と検索すると、最初に以下の拡張機能が表示されるため、クリックします。

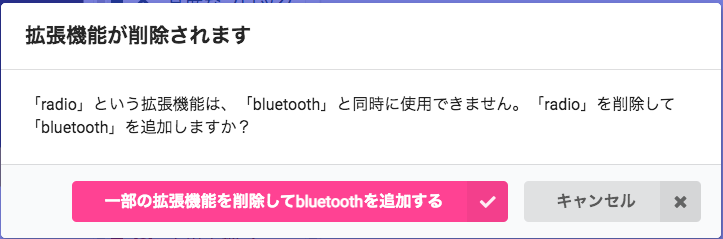
クリックすると、標準の無線機能(radio)を削除する必要があるとのメッセージが出ます 2 。これは、標準の無線機能(radio)もBluetoothも、同じオンボードの2.4GHz帯を使っているためのようです。
micro:bitのコードでは、「最初だけ」ブロックの中で、BluetoothUARTサービスをオンにしておきます。
micro:bitで利用可能なBluetoothのサービスは、センサーの数値などを取得できる特定のサービスと、汎用的なUARTサービスに分かれるところ、今回はスマホアプリから送る文字に応じてETCゲートをオープン・クローズすることを目的とするため、UARTサービスを使っています。
なお、特定のサービスとUARTサービスという分類は、ものものテックさんのウェブサイト(micro:bitで初めてのBLE通信)を参考にしています。このウェブサイトは分かりやすく、また、WebBluetoothを使った多様な作例の紹介もあります。 また、microbit.orgのサポートにも簡単な例が載っています(micro:bit Bluetooth Low Energy serial UART : Help & Support)。

その上で、「Bluetooth データを受信したとき 区切り文字(改行コード)」ブロック内で、「Bluetooth UART次のいずれかの文字の手前まで読み取る(改行コード)」にて、スマホからのデータを読み取っています。
データを変数に格納して、それが"o"であればオープン、"c"であればクローズしています。(途中で文字列を操作しているのは、そのままのデータでは、末尾に余分な文字列が含まれているのか、条件分岐がうまく働かないためです)。

スマホアプリは、Serial Bluetooth Terminalを使っています(Kai Morich's Android Apps)。"o"や"c"の文字を入力して送信するとmicro:bitを通じて、ミニETCゲートを遠隔操作できます。

手動モード(モバイルアプリ)
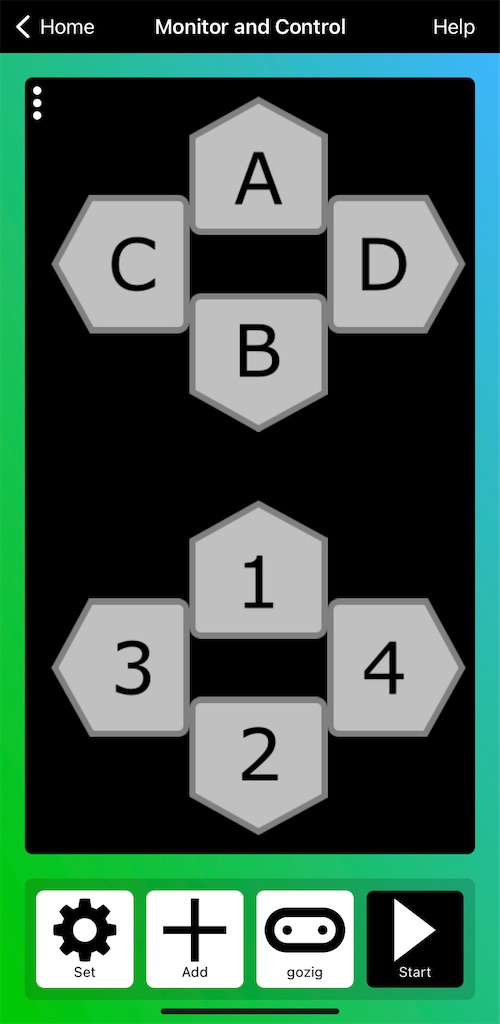
micro:bitには公式のモバイルアプリ(iOS版/android版)があり、micro:bitとBLEで接続して、プログラムを書き込むことができます。また、iOS版は、micro:bitから情報を受け取ったり、反対に情報を送って操作するためのインターフェースも備えています(monitor&control。Guide to mobile apps | micro:bit)
このmonitor&controlには幾つか機能がありますが、そのうちgamepadは2つの十字キーを利用でき、ロボットなどの操作に便利そうです。
今回は、ゲートの上げ下げだけなので、本当は複数ボタンは必要ないのですが。昨年gamepadの利用方法が変わり、「高度なブロック」>「制御」>「イベントが届いたとき」ブロックを使う仕様になったことを、さとやまノート(マイクロビットを使ってみる 〜マイクロビットをスマホでコントロール 2 | さとやまノート)で知り、使ってみたくなりました。
monitor&controlは、BLEイベントサービスの一つであり、詳しい仕様はこちらに記載があります。micro:bit側はBLEを使えるようにしておく必要があります。
monitor&controlからの受信は「イベントが届いたとき」ブロックの発生源をMES_DPAD_CONTROLLER_IDにして、ボタン毎のイベント値で条件分岐しています。一目瞭然ですが、上ボタンを押す(イベントの値: 1)とオープン、下ボタンを押す(イベントの値: 3)とクローズするように設定しています。

条件分岐の箇所で使っているイベントの値ですが、microbit-dalのソースコードのうちMESEvents.hにて定義されています。
#define MES_DPAD_BUTTON_A_DOWN 1 #define MES_DPAD_BUTTON_A_UP 2 #define MES_DPAD_BUTTON_B_DOWN 3 #define MES_DPAD_BUTTON_B_UP 4 #define MES_DPAD_BUTTON_C_DOWN 5 #define MES_DPAD_BUTTON_C_UP 6 #define MES_DPAD_BUTTON_D_DOWN 7 #define MES_DPAD_BUTTON_D_UP 8 #define MES_DPAD_BUTTON_1_DOWN 9 #define MES_DPAD_BUTTON_1_UP 10 #define MES_DPAD_BUTTON_2_DOWN 11 #define MES_DPAD_BUTTON_2_UP 12 #define MES_DPAD_BUTTON_3_DOWN 13 #define MES_DPAD_BUTTON_3_UP 14 #define MES_DPAD_BUTTON_4_DOWN 15 #define MES_DPAD_BUTTON_4_UP 16
条件分岐の箇所では、上記を参照して数値を入力する代わりに、「高度なブロック」>「制御」>「…その他」>「MICROBIT_EVT_ANY」のブロックを取り出し、このブロックの右端▼から「MES_DPAD_BUTTON_UP」等を選ぶ方法も可能であり、こちらの方がコードを見てgamepadのどのボタンに対応した操作なのか一見してわかりやすいです。
もっとも、gamepadの特定のボタンではなく、いずれかのボタンをDOWN/UPしたときにある動作をする、というプログラムを考えると、上記の数値の規則性、DOWNは奇数、UPは奇数、を理解しておいた方が、条件分岐を簡潔に書けるメリットはありそうです。
例えば、前後左右に動くロボットをgamepadをリモコンにして動かすとき、いずれかのボタンUPでロボットの動作を止めるとしたいときには、「イベントの値を2で割ったあまり=0なら」(イベントの値が偶数ならば)という条件分岐だけで処理できそうです。
注意事項
JOIZとサーボモーターの組み合わせはメーカーが想定したものでは当然なく、相互に破損のおそれがあります。また、磁気センサー探知のため、小さい磁石を使用していますが、小さい磁石については誤飲事故が報告されています。
- 強力な磁石のマグネットボールで誤飲事故が発生−幼児の消化管に穴があき、開腹手術により摘出−(発表情報)_国民生活センター
- マグネットパズルの破損に注意−内蔵された強力な磁石を誤飲した幼児の胃や腸に穴があく事故が発生−(発表情報)_国民生活センター
編集履歴
2022/07/14 高度なブロック」>「制御」>「…その他」>「MICROBIT_EVT_ANY」のブロックの利用方法について加筆